openGauss的模拟信号机制
从多线程下的信号机制讲起,在Linux下所有线程共享进程的signal action,如何做到每个线程对相同信号有不同处理方式呢?一起看看OpenGauss是如何设计的。
多线程下的信号机制
在linux下,每个进程都有自己的signal mask,这个信号掩码指定哪个信号被阻塞,哪个不会被阻塞,通常用调用sigmask来处理。同时一个进程还有自己的signal action,这个行为集合指定了信号在进程内的所有线程该如何处理,通常调用sigaction来处理。
使用了多线程后有以下几个关键问题:
- 信号发生时,哪个线程会收到?
- 每个线程都有自己的mask及action吗?
- 每个线程能按自己的方式处理信号吗?
如果是异常产生的信号(比如程序错误,像SIGPIPE、SIGEGV这些),则只有产生异常的线程收到并处理。
如果是用pthread_kill产生的内部信号,则只有pthread_kill参数中指定的目标线程收到并处理。
如果是外部使用kill命令产生的信号,通常是SIGINT、SIGHUP等job control信号,则会遍历所有线程,直到找到一个不阻塞该信号的线程,然后调用它来处理。(一般从主线程找起),注意只有一个线程能收到。
第二个问题:每个线程都有自己独立的signal mask,但所有线程共享进程的signal action。这意味着进程内的所有线程共享进程的信号处理函数,当进程内的一个线程为某个信号注册了处理函数,另一个线程可以更改这个处理函数。
第三个问题:由第二点可知,所有线程处理信号的方式都是一样的。
模拟信号的基本思想
openGauss是多线程架构,在同一个进程内的不同的线程注册不同的处理函数,则后者会覆盖前者的信号处理。如何做到对于相同信号,不同线程有不同处理方式呢?
答案是:绕开操作系统,由oG自己实现信号机制。让线程定义“信号”、定义“信号”的处理函数。
信号模拟的基本原理是每个线程注册管理自己的信号处理函数,信号枚举值仍然使用系统的信号值,线程使用自己的变量记录信号和回调函数对应关系。
结构体
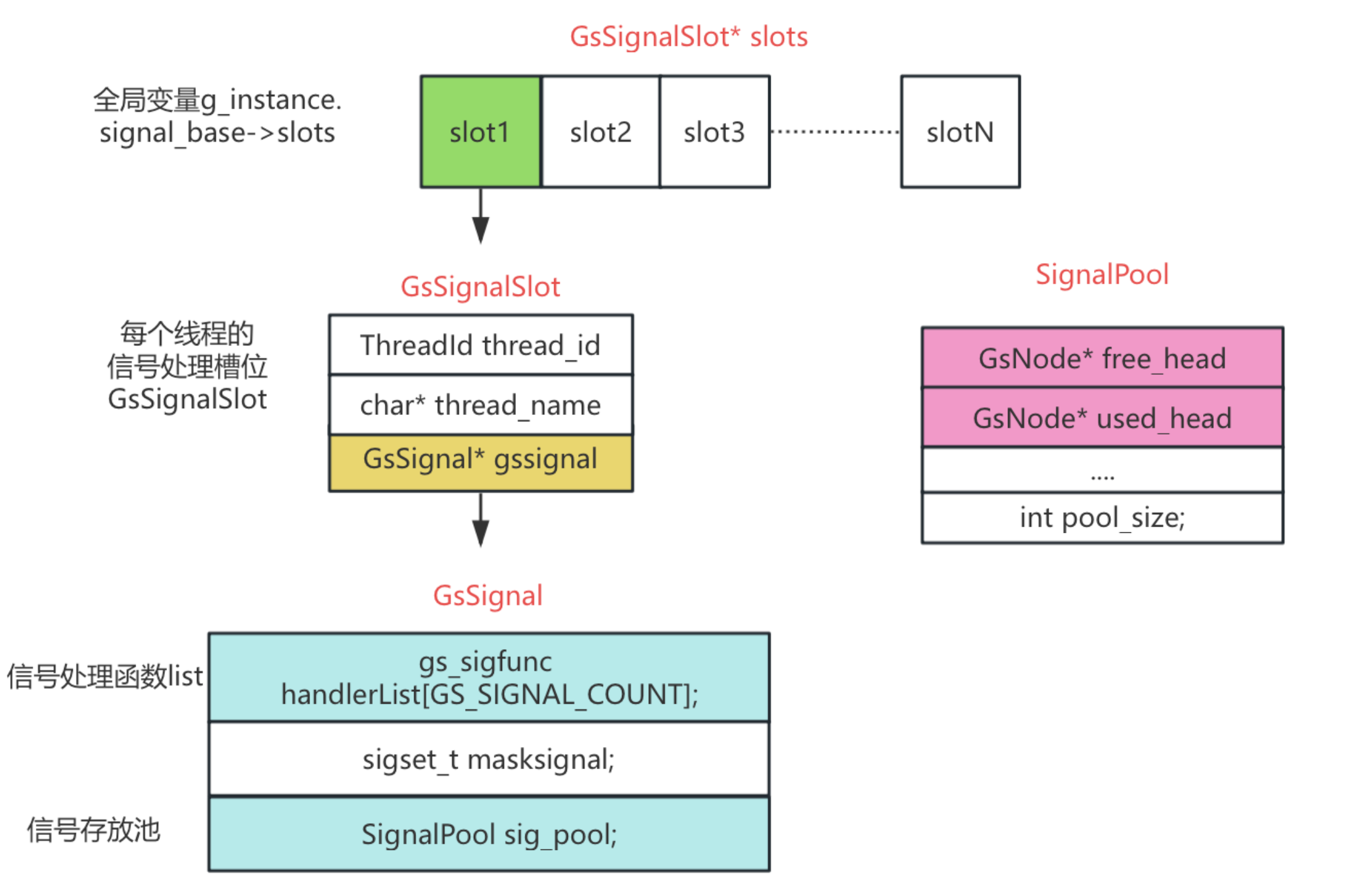
具体到代码细节中,我们会有一个保存所有线程对于信号处理和信号的结构体GsSignalSlot的数组:g_instance.signal_base->slots。
GsSignalSlot中重要的是 GsSignal ,它描述了一个线程怎么处理信号 gs_sigfunc 以及线程要处理的信号 SignalPool。
到这里,我们大致可以猜出信号发送和处理的逻辑流程了。
线程A给线程B发送信号:
- 遍历g_instance.signal_base->slots,找到B的slot
- 构造信号GsNode,然后添加到B的信号池中
线程B接收信号:
- 遍历自己信号池,取出未处理的信号进行处理
但是线程B怎么知道有信号到来?如何在合适的时机进行信号池的遍历?后续将一一揭晓。
1 | // 定义一个结构体,用于表示信号槽,即信号与处理线程之间的关联 |
然后就是具体信号相关的结构体:
1 | // 信号链表 |
基本思想
在进程环境中,对信号的处理是异步的:先注册信号处理函数,当信号异步发生时,由信号处理函数来处理信号。
但在多线程中处理信号的原则是:将信号的异步处理转换成同步处理。也就是说用一个线程专门的来“同步等待”信号的到来,而其它的线程可以完全不被该信号中断/打断(interrupt)。这样就在相当程度上简化了在多线程环境中对信号的处理,且可以保证其它的线程不受信号的影响。
模拟信号初始化
1 | if (isBoot) { |
在main.cpp的启动流程中,关于信号处理有以下几个步骤:
- 启动信号监听器线程
- 初始化信号槽
- 停止阻塞SIGUSR2信号
- 为当前线程分配信号槽位
信号监听线程和信号槽前面已经介绍过,这里SIGUSR2是操作系统留给用户的自定义信号。
在oG中,这个信号被用于线程间通讯。也就是说线程互相发“信号”中的“信号”,都是SIGUSR2。线程收到SIGUSR2后的行为,统一都是遍历自己的信号池,对待处理的信号进行处理。
信号监听器线程启动
1 | void gs_signal_monitor_startup(void){ |
前述在main.cpp中启动了监听线程gs_signal_monitor_startup(),实际上做的事有:
- 阻塞SIGUSR2信号
- 加载SIGUSR2信号的处理函数
- 启动信号监听线程
阻塞SIGUSR2信号是为了让监听线程启动不受该信号影响。
gs_signal_install_handler()在进程级别设置SIGUSR2信号的处理函数为gs_res_signal_handler, RES_SIGNAL 被定义为 SIGUSR2。
1 | STATIC gs_sigaction_func gs_signal_install_handler(void){ |
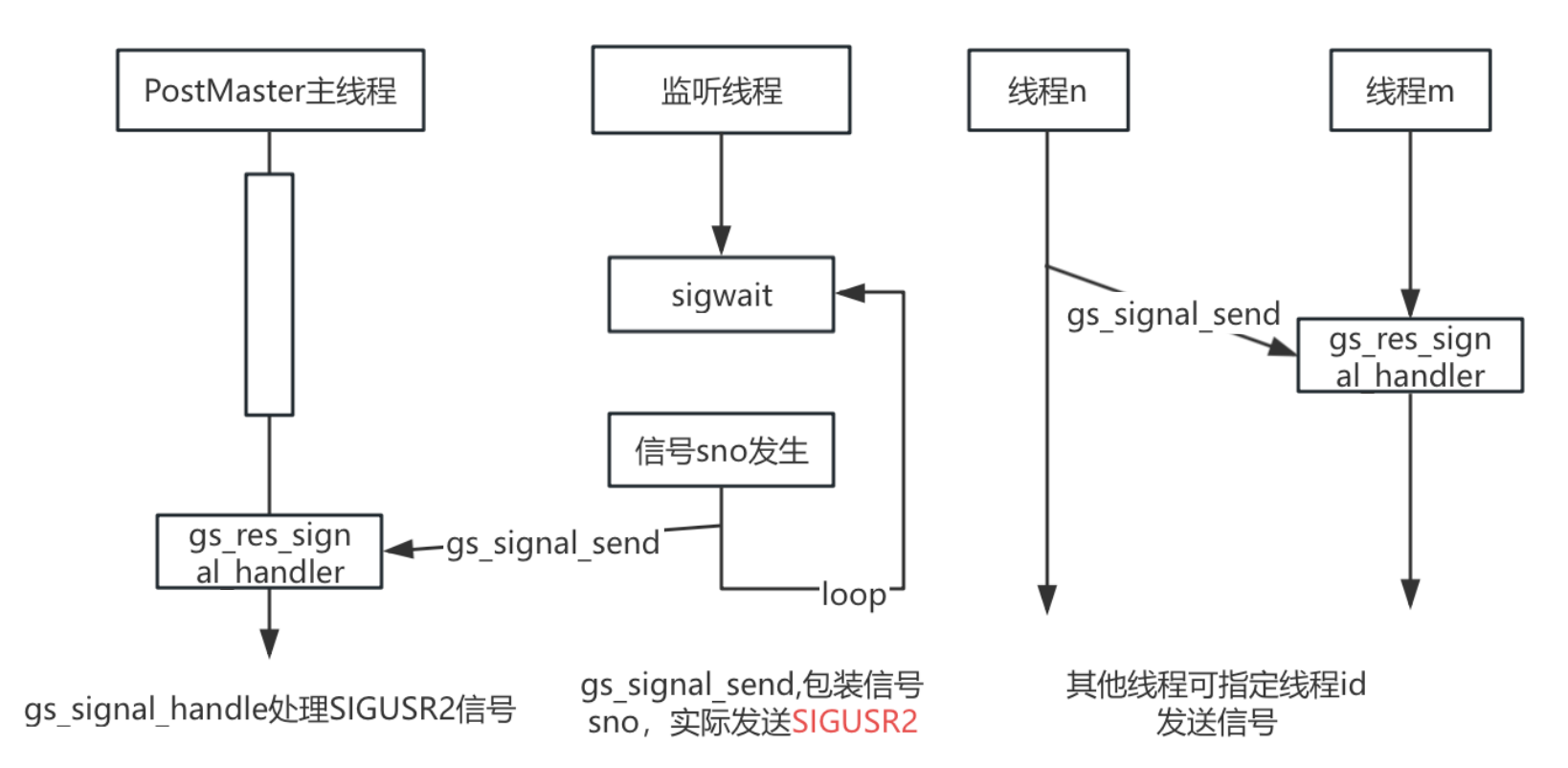
然后启动了信号监听线程:我们看到这个监听线程的作用就是等待信号到来,然后由它将信号发送给具体的线程,将异步的过程改为同步的过程。
1 | void* gs_signal_receiver_thread(void* args){ |
volatile ThreadId PostmasterPid = 0;
这里 gs_signal_send 下面会介绍,目前只要知道它是发送信号的函数。
1 | /* |
而这个PostmasterPid在 !IsUnderPostmaster 下,为自身线程的ID。也就是说,Postmaster的子线程的PostmasterPid是固定的,它代表postmaster的线程ID。
这样我们知道,当有外部信号发生时,它被信号监听线程捕获,然后发送给postmaster主线程处理!
信号槽初始化
xx
模拟信号使用
信号注册
在每一个线程中,都需要单独为信号注册处理函数,比如线程池的监听器组件:
1 | void TpoolListenerMain(ThreadPoolListener* listener) |
注册信号处理函数gspqsignal调用gs_signal_register_handler为信号设置处理函数,其实就是往handlerList里填处理函数的地址。
1 | static gs_sigfunc gs_signal_register_handler(GsSignal* gs_signal, int signo, gs_sigfunc fun){ |
信号发送
gs_signal_send 发送信号主要包括两步:
- 包装模拟信号
code = gs_signal_set_signal_by_threadid(thread_id, signo); - 向线程发送信号
code = gs_signal_thread_kill(thread_id, RES_SIGNAL);
gs_signal_set_signal_by_threadid 包装模拟信号的逻辑比较简单,主要为:
- 根据thread id 找到对应的信号槽slot
- 在slot的信号池中找到空闲的gsnode
- 将信号注册到gsnode中
gs_signal_thread_kill 的逻辑也很简单,其实就是对pthread_kill的封装。但是有一点,它遍历了slot,这可能是为了验证线程存在:通过遍历信号槽数组,gs_signal_thread_kill可以验证指定的线程ID是否确实存在于当前进程的上下文中。如果线程ID不存在于数组中,那么可能意味着该线程已经退出或从未被创建,因此发送信号没有意义。
1 | static int gs_signal_thread_kill(ThreadId tid, int signo){ |
注意:gs_signal_send 发送的信号始终是 RES_SIGNAL 即 SIGUSR2 ,那么对应线程的处理则由gs_signal_handle函数进行!
信号接收
前述oG的模拟信号初始化的过程中阻塞了SIGUSR2信号,等到信号监听线程启动后,又停止阻塞SIGUSR2信号。由于新建的线程都继承了父线程的sigmask,它们都不会阻塞SIGUSR2信号。并且,所有线程共享sigaction,对于SIGUSR2信号处理行为是一致,就是gs_signal_handle函数。
它的行为是:
①遍历信号池使用列表,找到一个需要处理的信号。
②找到这个信号对应的信号处理函数。把GsNode移到空闲列表中。
③调用gs_signal_handle_check函数检查当前的条件是否仍然满足。如果仍然有效,回调处理函数。
总结
监听线程同步等待信号,但是对于其他线程来说,处理信号的过程还是异步的(接收SIGUSR2信号,然后在自己的信号池里取出模拟信号处理)。